Rule types/standard functions
|
Create your own functions: Function configuration |
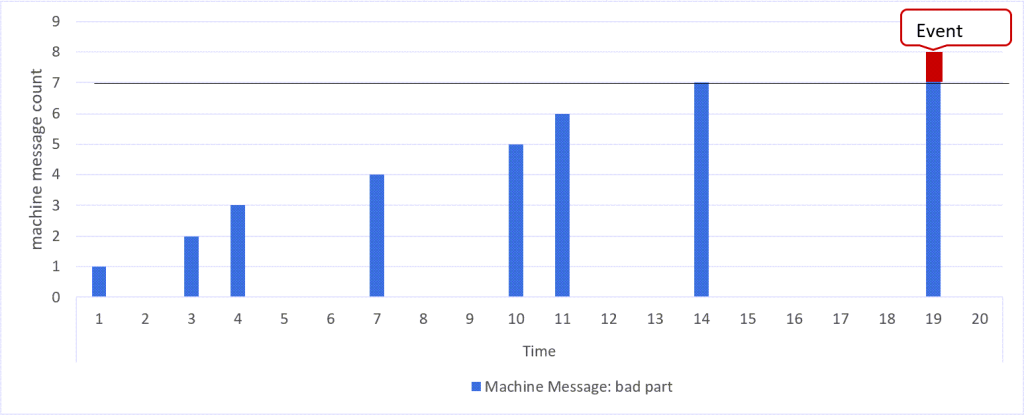
Frequency of Countable Events Rule Type
The Frequency of countable events rule type counts the occurrence of a specific machine message. The event is triggered when the frequency at which the machine message occurs exceeds the configured limit.
Example
The machine sends a message for each reject that has been produced. Production of some rejects is expected and not critical. The configured limit is seven rejects produced in a period of 20 minutes.
|
As soon as more than seven rejects have been produced in the configured time period, an event is triggered. |
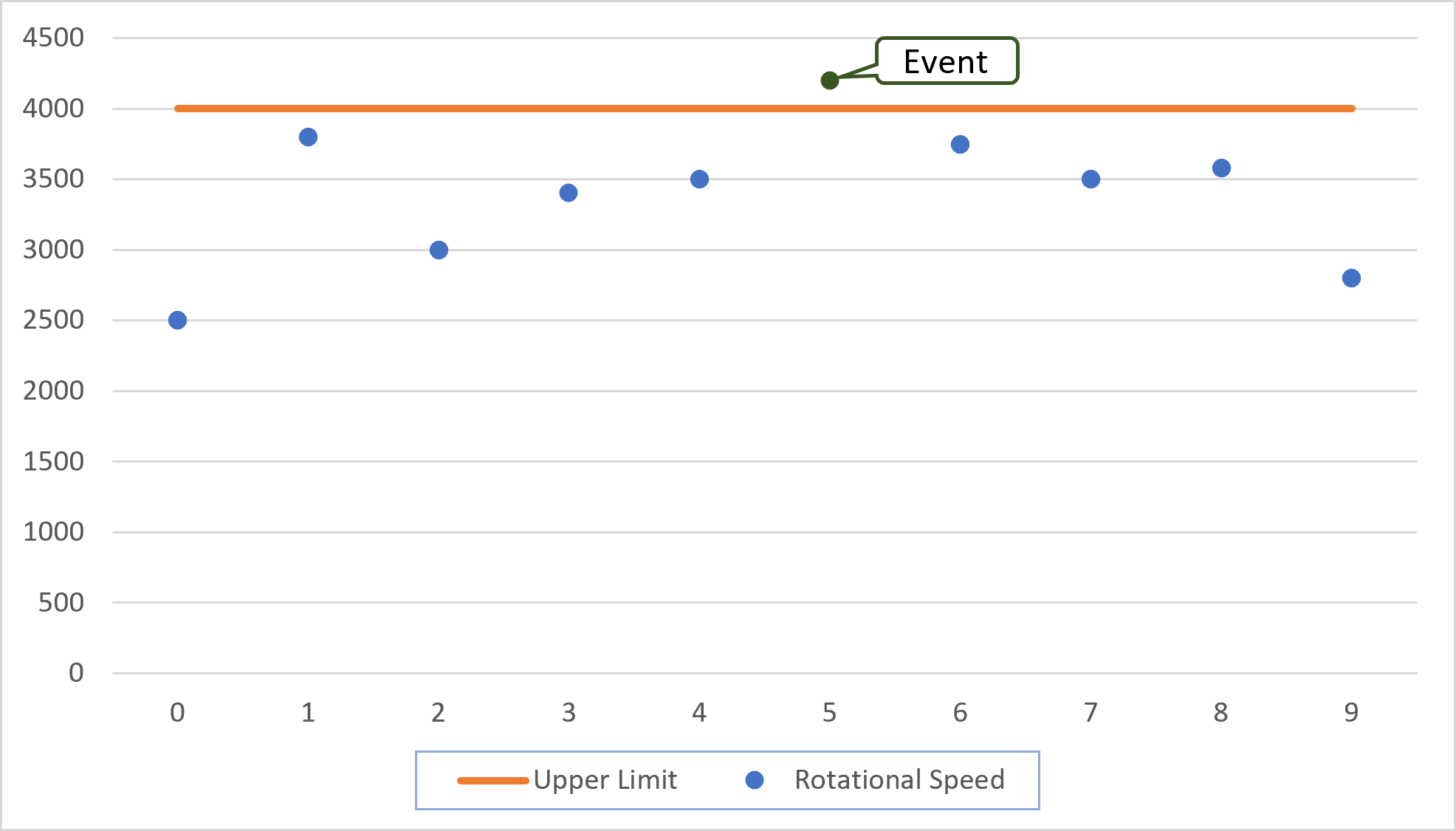
Upper Limit/Lower Limit Rule Type
The Upper Limit / Lower Limit rule type checks whether the measured values exceed the set linear limits. The event is triggered when a certain number of measured values exceeds the set limit.
Rule type variants
Example
The rotational speed of a motor is monitored. An upper limit of 4000 rpm has been defined.
|
For example, if a measured value reaches 4200 rpm, the defined upper limit of 4000 rpm has been exceeded. An event is triggered. |
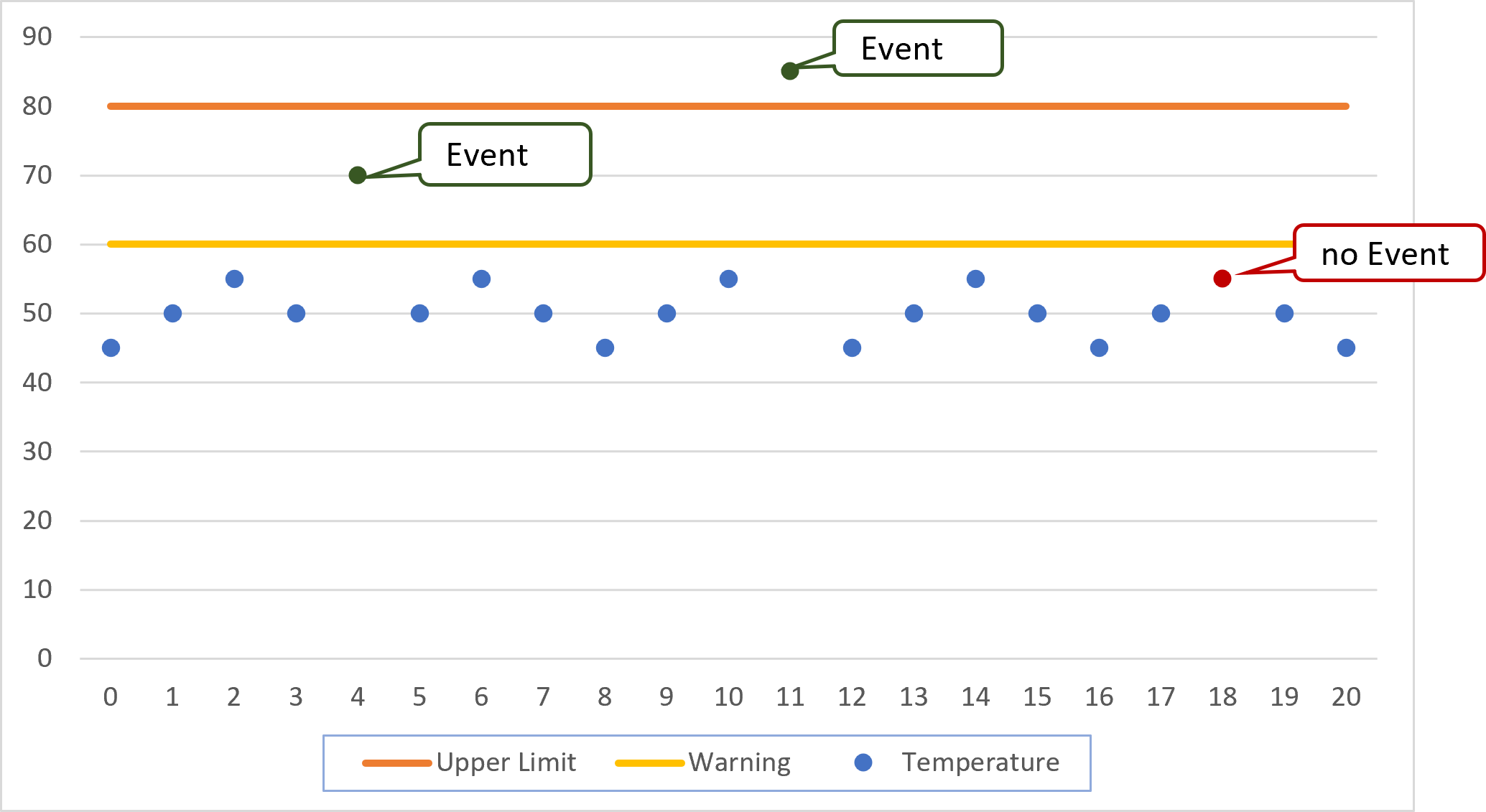
Upper Limit/Lower Limit Rule Type (Calculated Limit)
The Upper Limit (Calculated Limit) and Lower Limit (Calculated Limit) rule types first check whether the most recent measured value including the deviation is above or below the configured limit value (80 and 20 in this example). The system then checks whether the measured value is above or below the configured warning limit. This warning limit can be defined with Absolute or Relative Values.
The PPMP upper/lower limit error is also included in the calculation. If the most recent measured value is above or below the limit value, the previous measured values are checked. The event is triggered when a set number of measured values exceeds or undershoots the configured limit.
Calculation of limit values:
-
Option 1: The absolute value warning limit is calculated as follows:
Upper limit of the warning limit: Upper limit – deviationLower limit of the warning limit: Lower limit + deviation -
Option 2: The relative value warning limit without tolerance is calculated as follows:
Upper limit of the warning limit: Upper limit – (upper limit*relative deviation/100)Lower limit of the warning limit: Lower limit + (lower limit*relative deviation/100) -
Option 3: The relative value warning limit with tolerance is calculated as follows:
Upper limit of the warning limit: Upper limit – (relative deviation/100 * upper limit – lower limit)/2Lower limit of the warning limit: Lower limit + (relative deviation/100 * upper limit – lower limit)/2
Rule type variants
Example
In the machine data, the upper temperature limit is set to 80°C. A warning is to be issued if the temperature is 20°C away from the upper limit.
|
If the measured value exceeds 60°C, an event is triggered. |
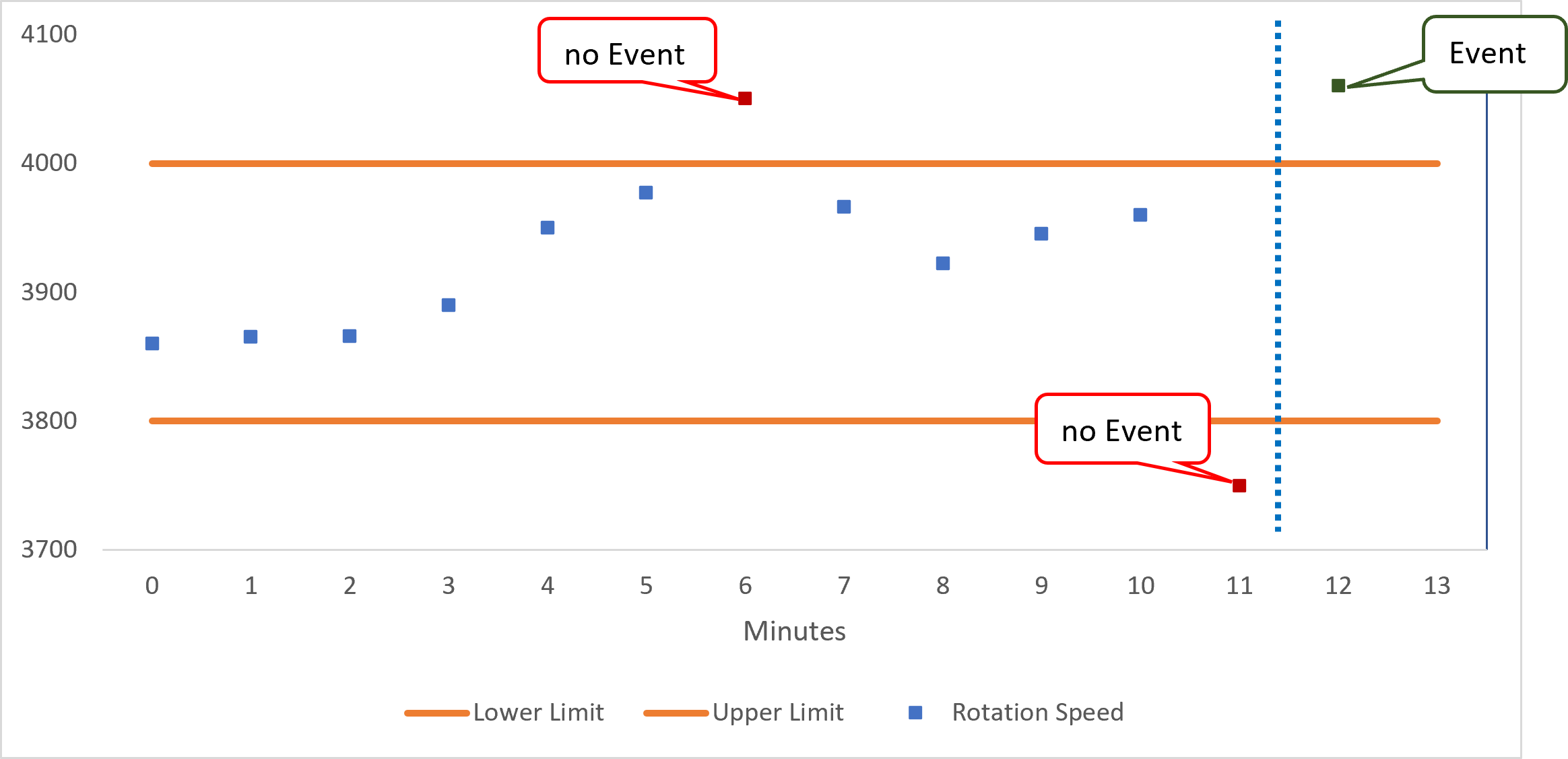
Upper Limit/Lower Limit (Priority of Current Value) Rule Type
The Upper Limit (Priority of Current Value) and Lower Limit (Priority of Current Value) rule types check whether the most recent measured value is above or below the configured limit value (4000 and 3800 in the example). If the most recent measured value is above or below the limit value, the previous measured values are checked. The event is triggered if the measured values exceed or undershoot the configured limit a set number of times within a given time period (in the example, exceeded or undershot twice per minute).
Rule type variants
Example
The rotational speed of a motor is monitored. An upper limit of 4000 rpm and a lower limit of 3800 rpm have been defined. In addition, two overshoots of the defined limits per minute have been defined.
|
If the upper limit of 4000 rpm is exceeded three times within one minute, an event is triggered on the third overshoot. |
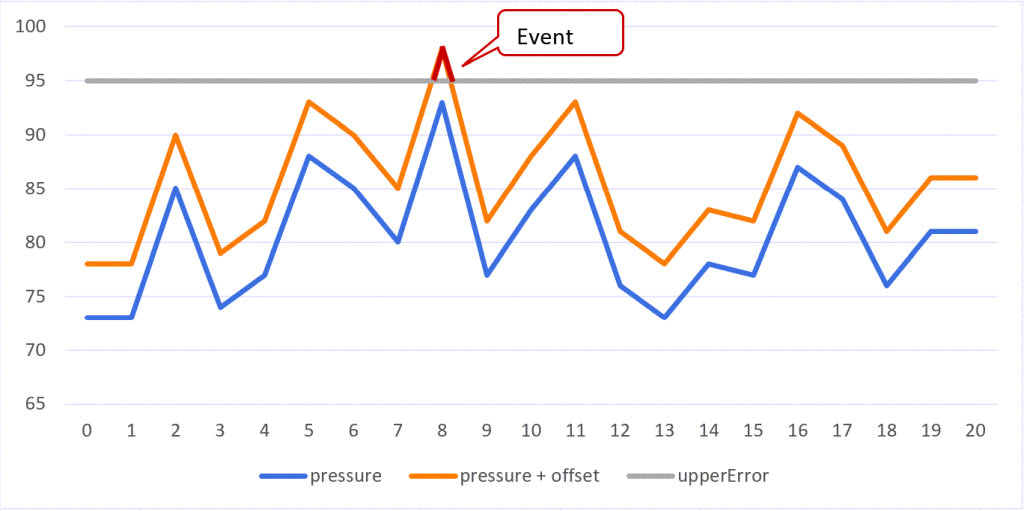
PPMP Limit Rule Type
The PPMP limit rule type adds a value (offset) to a measured value and compares the resulting value (measured value and offset) with the limit values sent in the PPMP.
Example
The efficiency of a mechanical system is checked. The efficiency depends on the project type.
|
If the efficiency is a certain distance from a defined limit, an event is triggered. |
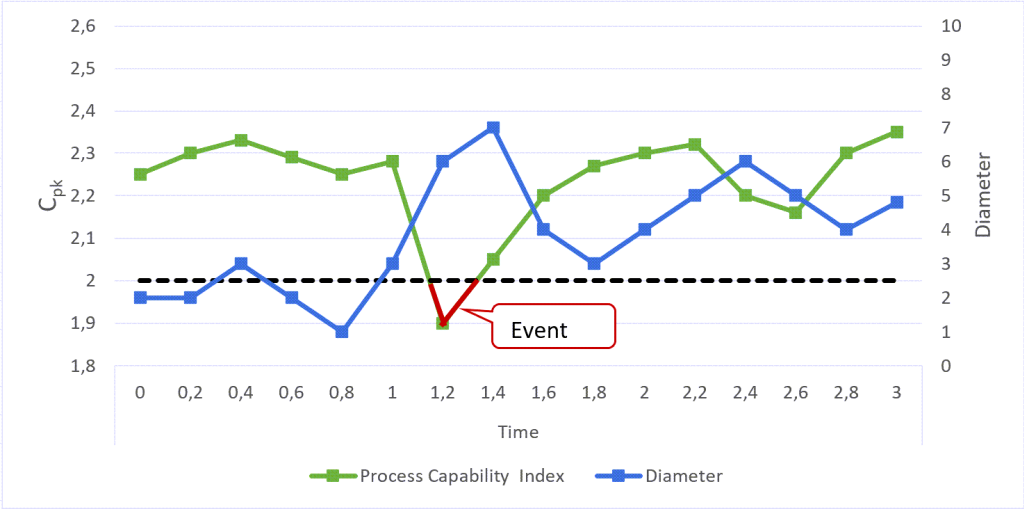
Process Capability Index Rule Type
The Process capability index rule type monitors the stability of a process. The rule type calculates the C pk of normally distributed data. An event is triggered if the calculated C pk violates the configured limits of the C pk.
The process capability index is calculated as follows:

The values are distributed normally.
Example
The quality tolerance of a rotation is used to define the upper and lower specification limits.
|
If the observed C pk value is less than the configured C pk value, an event is triggered. The C pk value drops when the diameter values fluctuate. |
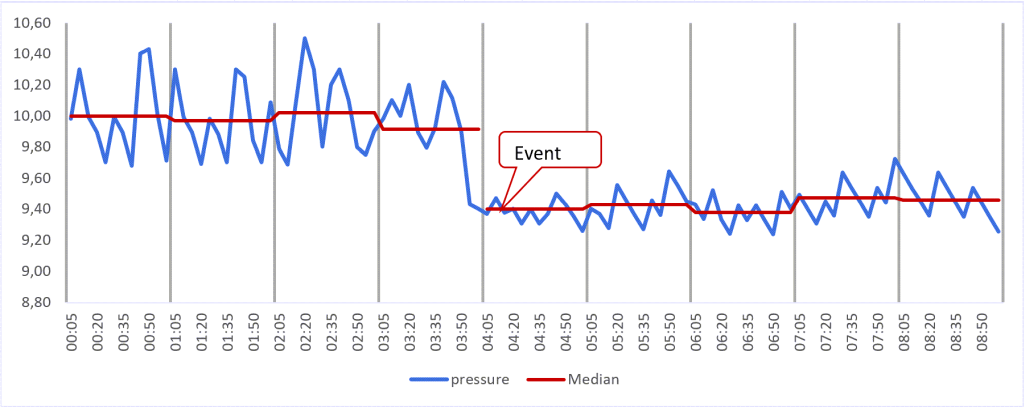
Jump Detection Rule Type
The Jump Detection rule type checks whether the current measured value has a value jump compared to the calculated minimum or maximum value of the previous measured values. The event is triggered if the difference between the current measured value and the calculated minimum or maximum value of the previous measured values exceeds the configured jump value.
Calculation of the value, for comparison with the jump value:
-
abs(max(of previous measured values) - new measured value) -
abs(new measured value - min(of previous measured values))
Example
A machine presses constantly with approx. 10 kN. In the rule, the value jump is set to 0.5 and the observation period is set to 60 seconds. Over the last 60 seconds, the average value was 9.9 kN.
|
If the average value of the measurements then falls to less than 9.4 kN within the following 60 seconds, an event is triggered. |
Trend (Method of Least Squares, Time-Based or Normalized) Rule Type
The Trend (method of least squares, time-based or normalized) rule type models a trend line in the measurement series. The gradient of the trend line is monitored.
Rule type variant : Trend Rule Type
Example
In the case of an injector, the supply of fluid is controlled by the decrease in the fill level. The rate of the decrease in liquid in the machine is calculated as a trend based on past data (e.g. from the previous minute, as an example period of time).
|
If a loss of fluid occurs and the current fill level is therefore outside the previous trend line, an event is triggered. |
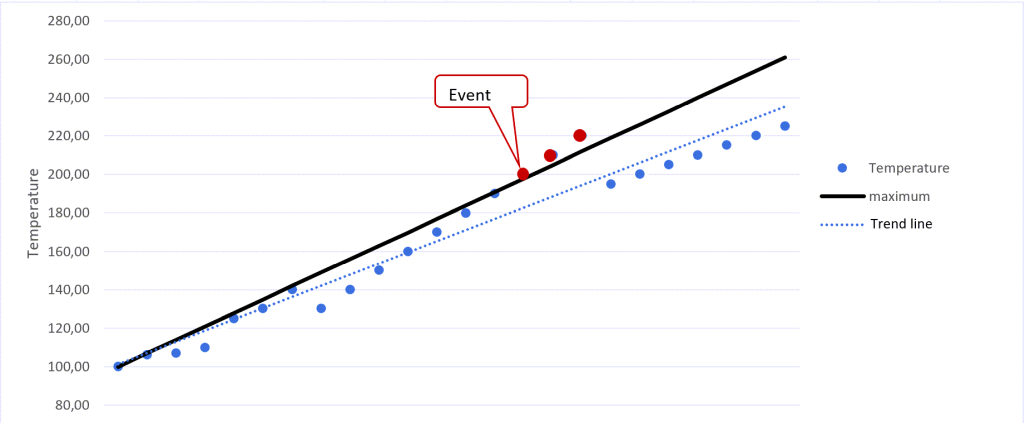
Trend Rule Type
The Trend rule type checks whether the measured value trends away from the calculated target fit line:
-
Calculation of the Target fit line :
Line between the oldest measured value and the sum of the oldest measured value and the configured target value
-
Calculation of the Current best fit line :
Line calculated from all measured values
-
Comparison of the two lines:
If the current best adjustment line is above or below the target adjustment line, an event is triggered.
Rule type variant : Trend (Method of Least Squares, Time-Based or Normalized) Rule Type
Example
There is a temperature sensor in the machine. Over time, the temperature rises steadily. The difference within one minute should not exceed 5°C.
|
If the temperature suddenly rises faster than the trend within one minute, an event is triggered. |